
This paper is included in the
Proceedings of the 21st USENIX Symposium on
Networked Systems Design and Implementation.
April 16–18, 2024 • Santa Clara, CA, USA
978-1-939133-39-7
Open access to the Proceedings of the
21st USENIX Symposium on Networked
Systems Design and Implementation
is sponsored by
Can’t Be Late: Optimizing Spot Instance Savings
under Deadlines
Zhanghao Wu, Wei-Lin Chiang, Ziming Mao, and Zongheng Yang, University of
California, Berkeley; Eric Friedman and Scott Shenker, University of California, Berkeley,
and ICSI; Ion Stoica, University of California, Berkeley
https://www.usenix.org/conference/nsdi24/presentation/ wu-zhanghao

Can’t Be Late: Optimizing Spot Instance Savings under Deadlines
Zhanghao Wu, Wei-Lin Chiang, Ziming Mao,
Zongheng Yang, Eric Friedman
†
, Scott Shenker
†
, Ion Stoica
University of California, Berkeley
†
UC Berkeley and ICSI
Abstract
Cloud providers offer spot instances alongside on-demand
instances to optimize resource utilization. While economically
appealing, spot instances’ preemptible nature causes them
ill-suited for deadline-sensitive jobs. To allow jobs to meet
deadlines while leveraging spot instances, we propose a
simple idea: use on-demand instances judiciously as a backup
resource. However, due to the unpredictable spot instance
availability, determining when to switch between spot and
on-demand to minimize cost requires careful policy design. In
this paper, we first provide an in-depth characterization of spot
instances (e.g., availability, pricing, duration), and develop a
basic theoretical model to examine the worst and average-case
behaviors of baseline policies (e.g., greedy). The model serves
as a foundation to motivate our design of a simple and effective
policy, Uniform Progress, which is parameter-free and requires
no assumptions on spot availability. Our empirical study, based
on three-month-long real spot availability traces on AWS,
demonstrates that it can (1) outperform the greedy policy by
closing the gap to the optimal policy by 2
×
in both average
and bad cases, and (2) further reduce the gap when limited
future knowledge is given. These results hold in a variety of
conditions ranging from loose to tight deadlines, low to high
spot availability, and on single or multiple instances. By im-
plementing this policy on top of SkyPilot, an intercloud broker
system, we achieve 27%-84% cost savings across a variety of
representative real-world workloads and deadlines. The spot
availability traces are open-sourced for future research.
1
1 Introduction
As organizations continue to migrate their workloads to
clouds, the need to minimize operational costs has become
a critical concern [41]. One of the top contributors to cloud
spending is the cost of compute instances [8], which are
typically offered in two pricing models: on-demand and spot.
2
On-demand instances are available but come at a premium
1
See spot traces:
https://github.com/skypilot-org/spot- traces
2
In this paper, we do not consider “reserved” instances, whose economics
involves volume contracts and is more complex.
V100 GPU 64-core CPU
AWS 3× 2–6×
Azure 3–6× 3–10×
GCP 3× 4–11×
Table 1: Cost savings of spot vs. on-demand instances.
cost. In contrast, spot instances are typically 3–10
×
cheaper
(Table 1), but are less available and they can be preempted unex-
pectedly. As a result, more applications such as analytics [13],
AI [28, 37, 40], HPC [29], and CI/CD workloads [1], are lever-
aging spot instances to reduce costs. To handle preemptions,
these jobs either checkpoint periodically and recover from the
last checkpoint on restart [25,46], or re-execute the entire job.
However, while many applications can tolerate uncertainties
introduced by spot instance preemptions, others cannot. One
such category is delay-sensitive applications where a job needs
to finish by a certain deadline [24]. Examples include process-
ing new user data to keep an AI model up-to-date in a recom-
mendation system, or analyzing the latest information to make
timely decisions in a trading application. Therefore, most of
deadline-sensitive applications eschew spot instances in favor
of on-demand instances, thus trading off cost for predictability.
In this paper, we resolve this tradeoff by enabling an applica-
tion to leverage spot instances while still meeting its deadline.
For simplicity, we focus on recoverable jobs running on a sin-
gle instance, and assume the running time of the job is known,
as well as its deadline. A job can be in one of three states:
(1) running on a spot instance, (2) running on an on-demand
instance, or (3) idle, i.e., waiting for a spot instance to become
available. We design scheduling policies that periodically
decide whether a job should remain in the same state or switch
to another state. When a job switches to a non-idle state we as-
sume there is a delay, e.g., the overhead of provisioning/setting
up a new instance, and re-starting from a previous checkpoint.
Due to the high unpredictability in spot instance availability
(§2.2), the key challenge lies in striking a balance between cost
optimization and deadline adherence to effectively leverage
the low cost of spot instances without missing the deadline.
A simple solution to this problem would be for a job to
USENIX Association 21st USENIX Symposium on Networked Systems Design and Implementation 185
use a spot instance up to the point at which the remaining
computation time equals the remaining time to deadline, and
then switch to an on-demand instance until it finishes. While
this “greedy” policy (§3.4) guarantees that the job will meet
its deadline, we show that it is sub-optimal. We do so by
developing a theoretical framework to study the worst-case
behavior (e.g., competitive ratio) of the policy (§4).
To address the limitations of “greedy” policy, we propose
a simple and effective policy, called Uniform Progress, which
aims to make uniform progress towards deadline, by distribut-
ing the job computation uniformly across the time. Uniform
Progress requires no assumption about spot instances’ avail-
ability and is parameter-free. Using simulations on real-world
traces we show that Uniform Progress outperforms greedy pol-
icy and approaches an optimal policy with limited knowledge
of the future (knowing how long the next spot instance is going
to last) in a variety of scenarios—from loose to tight deadlines,
and from low to high spot availability. We build a prototype
of Uniform Progress and evaluate it in a cloud setting on three
real-world workloads: ML training, scientific batch jobs, and
data analytics. Results show that Uniform Progress achieves
27–84% cost savings while meeting deadlines.
This paper is organized as follows. First, we provide an
in-depth characterization of spot instances across various
cloud regions, examining their availability patterns, pricing,
and lifetime to inform our policy design (§2). Next, we develop
a theoretical model that captures the essential dynamics of
spot instances, which enables us to examine the worst-case
behavior of a given policy (§3, §4). We then present our
policies for jobs with both single and multiple instances (§5)
and conduct a comprehensive empirical study on months-long
real-world traces of spot instances (§6). We build a prototype
implementation that supports the proposed policies in a
cloud setting, and evaluate these policies on three real-world
workloads (§7). Finally, we review related work in §8.
In summary, this paper makes the following contributions:
1.
We introduce a problem of using spot instances to min-
imize the cost of running a job with deadline adherence.
2.
We develop a theoretical framework to study the worst
and average-case behavior of baseline policies, providing
insights on the tradeoff between cost and deadline.
3.
We propose Uniform Progress, a simple but effective pol-
icy which is parameter-free and requires no assumptions
on spot availability. Empirically, we show the significant
improvement of the policy in a wide variety of scenarios.
4.
We implement a prototype system with Uniform Progress,
and evaluate it on real-world workloads.
Finally, we open source our three-month traces of spot instance
availability to encourage future research in this area.
2 Characterization of Spot Instances
In this section, we characterize spot instance availability and
pricing over time and across availability zones. We observe
high volatility in availability but a smooth pricing pattern. We
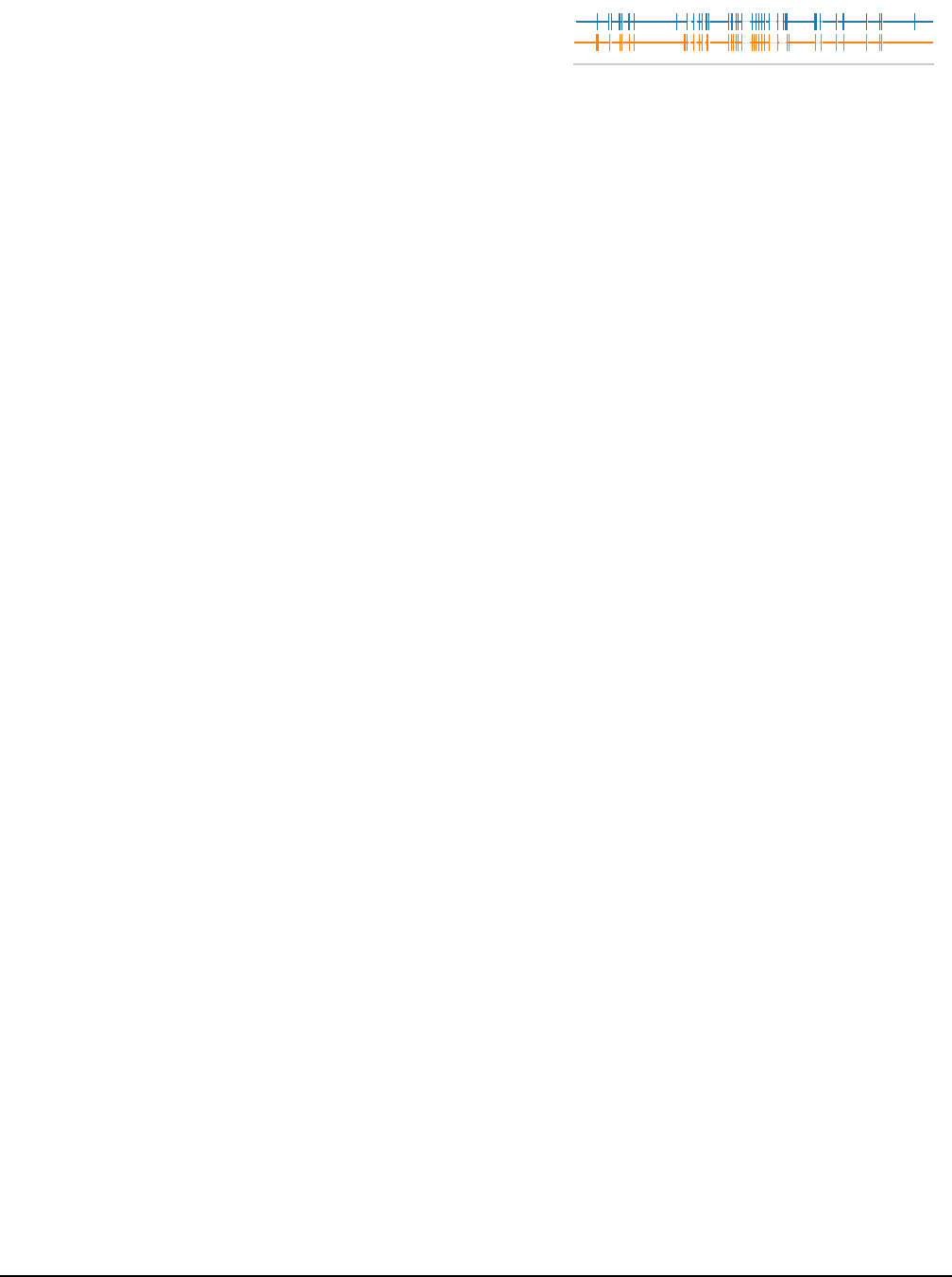
04/22 04/24 04/25 04/27 04/28 04/30
Availability
Preemption
Figure 1: Real spot preemptions and availability are highly
correlated. Trace is in AWS us-west-2b. Upper: preemptions.
Horizontal lines represent a running spot instance. Vertical
bars are preemptions. Lower: availability. Horizontal lines are
spot instance available periods. Vertical bars are changes from
availability to unavailability. Grey gaps are unavailability pe-
riods. Note that although some vertical bars look immediately
followed by a horizontal line, there are still gaps in between.
use these insights to drive the design of our scheduling policy.
2.1 Methodology of Spot Trace Collection
We collect spot availability traces from public clouds. A
trace is a time series showing whether a particular spot instance
type is available at a given time in a zone. We collect these
traces over a three-month period and in nine AWS availability
zones (three in us-west-2, four in us-east-1, two in us-east-2).
A key challenge of trace collection is that it can be pro-
hibitively expensive. For example, a spot V100 instance costs
about $1/hour. If we collect a real preemption trace where an in-
stance is kept live as much as possible modulo preemptions, col-
lecting three-month long traces in all nine zones could cost over
$10,000. Instead, we propose an approximation: we collect
availability traces, where we try to launch a spot instance every
10 minutes to probe if it is available and then immediately termi-
nate it. To validate this approach, Figure 1 shows a high correla-
tion between the real preemption and availability signals over
a week-long period. This approach reduces the cost of trace
collection by about
100×
. For completeness, we also include
real preemption traces in our evaluation of policy performance
on multi-instance jobs (§6.6) and real-world workloads (§7.2).
In this work, we focus on a few scarce instance types, i.e.,
Nvidia V100 and K80 GPU instances, which are now in high
demand [4] due to the rise of Generative AI and large language
models (LLMs). Focusing on these scarce instance types is thus
both useful and interesting, as they are frequently preempted,
providing a good testing ground for scheduling policies.
2.2 High Variance in Spot Availability
Our analysis reveals that spot availability varies significantly
across zones and over time. Figure 2 (left) shows the avail-
ability traces of 9 AWS zones over 2 weeks (4 example zones
are in Figure 2 and the rest 5 zones are in §A.1). We observe
a large difference across zones (e.g., us-west-2a vs us-east-1a).
The periods of unavailability can last for hours or even days.
To understand spot availability distributions, we overlay
6-hour windows on a 2-week period (thus,
14 × 24/6 = 56
windows per zone) and count the fraction of availability
probes that succeeded in each window. Figure 2 (right)
plots the distributions of spot availability fractions in the 56
windows per zone, which approximate the fraction of time
spot instances are available in each zone. We observe that each
186 21st USENIX Symposium on Networked Systems Design and Implementation USENIX Association

02/17 02/19 02/22 02/24 02/27 03/01
us-east-2b
us-east-1d
us-east-1a
us-west-2a
0% 20% 40% 60% 80% 100%
us-east-2b
us-east-1d
us-east-1a
us-west-2a
Figure 2: Spot Availability is highly unpredictable and volatile. Traces are across four of nine AWS zones collected. Left: Availability.
Horizontal lines are available periods. Vertical bars are changes from available to unavailable, followed by grey gaps indicating un-
available period. Right: Boxplots of spot availability fraction, i.e., percentage of the time an instance is available in 6-hour windows.
02/17 02/20 02/23 02/26 03/01
0%
50%
100%
us-east-2a
Availability
Price ratio
Figure 3: High volatility of spot availability fraction. Avail-
ability can jump from 100% to 0% within hours. Price ratio:
spot price divided by on-demand price.
zone can go from being highly available to mostly unavailable
across time (e.g., in us-east-2b, the difference between p25
and p75 is about 70%) and there is little correlation across
zones. In addition, Figure 3 shows changes in spot availability
fractions over time. We observe a highly volatile pattern:
availability can change from 100% to 0% within hours.
The results above suggest that scheduling policies should
be robust to highly unpredictable availability patterns. For
generality, in this paper, we make no assumptions on spot
availability patterns. We discuss existing prediction-based
approaches in §8 and leave this direction to future work.
2.3 Relative Stability in Spot Pricing
In contrast, we observe that spot pricing is much more stable
than availability. Figure 3 shows the price ratio of spot to
on-demand for AWS stays almost constant despite significant
changes in availability. In the three-month-long trace, we ob-
serve only a 5% price variation on average over any one-week
period, validating the recently introduced smooth pricing
model on AWS [5]. GCP’s spot instance prices are even more
stable as it is guaranteed to only change once every 30 days [3].
2.4 Correlation of Multi-Instance Availability
To understand the behavior of multiple spot instances, we
analyze 2-week preemption traces and 2-week availability
traces for clusters of 4 and 16 instances, respectively (see §6.1
for details). Notably, over 94% of the time, either all or none of
the instances are available in each cluster. This suggests avail-
ability tends to change simultaneously for multiple instances
(bulk preemption is also observed in [16]), up to a count of 16.
3 Using Spot for Deadline-Sensitive Jobs
In this section, we present a simple model to formulate the
problem, discuss when a policy matters, and then give three
rules for policy design followed by a basic greedy policy.
3.1 Problem Setup
We consider two types of instances with the same hardware:
an on-demand instance, which is always available,
3
and a spot
instance, whose availability is unpredictable. We assume that
spot availability is non-adversarial, meaning that it is indepen-
dent of the job’s choices and observable factors, except for §4.1,
where we adopt competitive analysis for the worst case study.
We focus on long-running (hours to days) jobs where
preemptions are likely. We firstly assume each job uses one
instance. We will extend it to multiple instances in §5.5 and
evaluate it in §6.6.
For a deadline-sensitive job, we denote remaining compu-
tation time at time
t
as
C(t)
and remaining time-to-deadline as
R(t)
. This implies that the job’s total computation time is
C(0)
,
and deadline is
R(0)
. Based on the definition, we can derive that
R(t) =R(0)−t and when a job is progressing, ∂C(t)/∂t =−1.
We assume that both
C(0)
and
R(0)
are given and the
job is fault-tolerant to interruptions. For example, ML
training typically has a consistent per-epoch time, indicating
a predictable total runtime, and the model weights can be
checkpointed and resumed for fault tolerance. Additionally,
computation times for many recurring jobs (e.g., data analytics,
scientific HPC, CI/CD) can be derived from past executions.
To account for overheads of starting the job on a new
instance, we introduce changeover delay,
d
, which includes the
time required to launch an instance, set up dependencies, and
recover any potential progress loss caused by gaps between
checkpoints or restarting the most recent unsaved execution.
Whenever a job switches to a new spot or on-demand instance,
a changeover delay occurs, meaning that
C(t)
does not
decrease for a duration of
d
while
R(t)
continues to decrement.
A delay
d
is charged at the new instance type’s price. Switching
from an instance to idle (i.e., termination) does not incur a
delay. We will extend the model to consider variety with
C(0)
and d in §5.6, and evaluate it in §6.7.
The goal is to minimize the cost for completing job’s
computation time
C(0)
before deadline
R(0)
, i.e.,
C(R(0)) ≤0
,
using spot and on-demand instances. For simplicity, we define
the price for an on-demand instance to be
k > 1
, and a spot
instance to be 1. We assume that cloud providers charge every
second when an instance is alive.
4
Based on the observation
3
This is a simplifying assumption. In practice, some on-demand instance
types can hit unavailability.
4
Cloud providers have different billing practices, e.g., AWS does not
USENIX Association 21st USENIX Symposium on Networked Systems Design and Implementation 187

IDLE
SPOT
VM
Spot Availability
0 10 20 30 40 50 60
Elapsed Time (hours)
IDLE
SPOT
VM
C(t) = R(t)
Optimal for d = 0 ($381.85)
(a) Without changeover delay.
0 10 20 30 40 50 60
Elapsed Time (hours)
IDLE
SPOT
VM
C(t) = R(t) + 2d
Greedy for d > 0 ($658.13)
(b) With changeover delay.
Figure 4: Example decision traces of policies on real spot
availability on AWS.
in §2.3, we assume both the on-demand and spot price are
fixed throughout the time before deadline R(0).
3.2 Scheduling Policy
At any time
t
, a job can be in one of the following three
states: idle, running on a spot instance, or running on an
on-demand instance. While we assume that on-demand
instances are always available, spot instances can be in one
of two states: available or unavailable. The job’s state space is
the combination of any of the instance state and the spot state,
except for an impossible case where the instance state is spot
with spot state unavailable (Table 2). A scheduling policy is
invoked to decide how a job moves across instance states.
Spot State \ Instance State Idle Spot On-Demand
Spot Available ① ③ ④
Spot Unavailable ② - ⑤
Table 2: State space for a job.
In the ideal case where changeover delay
d =0
, the problem
is simple. An optimal policy is to use a spot instance whenever
it is available, i.e., transition between state
②
and
③
, until
C(t) = R(t)
. After that, the job cannot stay idle, as it needs to
utilize all the remaining time before deadline to make progress.
Since there is no changeover delay, the policy can use spot
whenever it is available and switch to on-demand when it is
not, i.e., transition between
③
and
⑤
. This policy is optimal
because it utilizes all available spot instance lifetimes before
the deadline, without additional cost. Figure 4a shows an ex-
ample decision trace of how this policy performs for a job with
C(0) = 48
hours and
R(0)=60
hours on a real spot availability
trace, where the policy utilizes every spot lifetime, and runs
the remaining computation with on-demand instances.
However, when changeover delay
d >0
, which is the practi-
cal case, the problem becomes non-trivial. The policy now has
to decide whether it is worth switching to a different instance at
the expense of losing time
d
without making progress, which
increases the risk of missing the deadline. For example, apply-
ing the optimal policy above for
d >0
would result in missing
charge for spot instances preempted within the first hour, while GCP does.
the deadline, since every switch costs an additional time d.
In the remainder of this paper, we focus on designing
policies for the more practical d > 0 scenario.
3.3 Rules for Policy Design
Based on the problem setting, we propose three basic rules
that all policies without future knowledge should follow to
avoid unnecessary cost or missing the deadline.
Thrifty Rule. The job should remain idle after C(t) = 0.
Safety Net Rule. When a job is idle and
R(t) < C(t) + 2d
,
switch to on-demand and stay on it until the end.
The policy is required to guarantee the job finished by
the deadline. After
R(t) < C(t) + 2d
becomes true, it is no
longer safe to move from idle to spot. Otherwise, when the
changeover delay of the spot finishes, the remaining time will
become
R(t) <C(t)+d
, which means any preemption to the
spot instance will result in missing deadline. Note that one
could wait until
R(t) =C(t)+d
then move to on-demand, but
there is no gain for waiting an additional d if the job is idle.
Exploitation Rule. Once start using a spot instance, stay on
it until it is preempted.
If the job is on a spot instance, any progress made will
always cost the minimum price any policy could get, i.e.,
the spot price. Voluntarily switching from spot to idle or
on-demand will have no benefit, but less progress or more cost.
This rule will not violate the deadline because the Safety
Net Rule guarantees that
R(t) ≥ C(t) + 2d
holds at the
time
t
when the job is moved to the current spot instance.
After the changeover delay is incurred and the job starts
progressing,
R(t)−C(t)
will not change, i.e.,
R(t) ≥C(t)+d
holds, meaning the remaining time is enough for at least one
changeover even if the current spot is preempted. The job will
be able to switch to on-demand when Safety Net Rule kicks in.
3.4 Greedy Policy
Based on the three rules, we propose a straightforward
greedy policy. The greedy policy behaves as follows:
1.
Stay on any available spot instance until it is preempted
(Exploitation Rule), and keep waiting if no spot instance
is available, i.e., transition between ② and ③ in Table 2.
2.
(Safety Net Rule) When
R(t) <C(t)+2d
holds and the
job is idle, move to on-demand and stay there until the end.
In Figure 4b, we show the decision trace of the greedy policy
on the same spot availability trace as before (Figure 4a). The
greedy policy acts much more conservatively than the previous
optimal policy without changeover delay. That is because
greedy can no longer afford frequent switches between
on-demand and spot instances as before without missing the
deadline. Thus, we now turn our attention to: can we do better
than greedy while not assuming future knowledge?
4 Theoretical Analysis
In this section, we delve into theoretical aspects of the
problem and prove the existence of a policy that is better than
greedy in both worst and average cases.
188 21st USENIX Symposium on Networked Systems Design and Implementation USENIX Association

n-sliced greedy
6420
Shifted (n-1)-sliced greedy
Look for Spot Go to On-Demand
Figure 5: Example slicing for randomized shifted greedy (RSF)
policy, where deadline
R(0) = 6
, computation time
C(0) = 3
,
and slices n = 3. Dashed lines indicate boundaries of slices.
4.1 Worst Case with Competitive Analysis
We first look into the worst case by investigating the
competitive ratio
c
of a policy without knowledge of future
spot availability, which is the ratio of the cost of the policy to
the best omniscient policy with full knowledge of future spot
availability. By “worst” case, we assume that spot instances
are chosen by an oblivious adversary, who can base their
decisions on complete knowledge of the job’s policy but not
on random coin flips used by the policy. Our goal is to prove
that there is a policy with lower competitive ratio
c
than greedy,
i.e., performs better in the worst case.
To simplify the presentation, we assume changeover delay
d
is small and ignore the term
O(d)
. Also, we use
R(t) =C(t)+d
as Safety Net Rule’s condition, instead of
R(t) = C(t) + 2d
,
which will not affect the conclusion, due to negligible O(d).
A natural bound for
c
is
1 ≤ c ≤ k
, where
k
can be reached
when the oblivious adversary choose a case that a given policy
have to use all on-demand, and the omniscient policy could use
all spot instances. We can prove that for any
R(0)
,
C(0)
, a deter-
ministic policy cannot perform better than greedy (see §A.2.1).
Theorem 1. For any deterministic policy P, c ≥k−O(d).
With Theorem 1, we can conclude that a policy has to be ran-
domized to beat greedy, whose competitive ratio
c=k
, as an ad-
versary can simply make spot available from
t
′
, where
R(t
′
)=
C(t
′
)+d
. We now construct a better policy on top of greedy.
We first extend greedy to an
n
-sliced greedy policy, in which
we divide the time into
n
even slices with length
R(0)
n
and apply
greedy in each of these slices with
C(0)
n
progress to make. The
upper figure in Figure 5 is an example of
n
-sliced greedy, with a
deadline
R(0)=6
and 3 slices. In each slice, the policy enforces
the job to make ≥
C(0)
n
=1 units of progress within
R(0)
n
=2.
We then shift the
n
-sliced greedy policy by
C(0)
n
to get shifted
(n−1)
-sliced greedy policy, which uses on-demand for time
C(0)
n
from start (1 in the example Figure 5) and then applies
(n−1)-sliced greedy from t =
C(0)
n
until t =R(0)−
R(0)−C(0)
n
.
Although both policies have
c = k
, we can define a
randomized shifted greedy (RSF) policy by using either
the
n
-sliced or the shifted
(n − 1)
-sliced greedy with equal
probability at any time
t
. We can prove that the competitive
ratio for RSF is bounded and lower than greedy (see §A.2.1).
Theorem 2. If
R(0) ≥ 2C(0)
, then for RSF policy has
c≤
k+1
2
+
k−1
2n
+O(d)<k.
When deadline
R(0)
is more than
2×
longer than computa-
50 100 150
Actual Greedy Cost
50
100
150
Theoretical Cost
pearsonr=0.97
(a) Theoretical vs actual greedy
cost with delay d =0.01h.
0 50
#Slices
0.1
0.2
Variance
us-east-1a
us-east-1f
us-east-2b
us-west-2c
(b) Variance vs number of slices
with an 80-hour deadline.
Figure 6: Numerical results for validating the theoretical
greedy cost and the assumption for increasing variance in the
stochastic model. Both analysis are conducted on sampling
sub-traces from 2-month AWS spot availability traces.
tion time
C(0)
, the worst case (the largest gap to omniscient pol-
icy) for RSF policy is bounded, i.e., provably better than greedy.
For
R(0) ≤ 2C(0)
, we can simply use on-demand until
R(t) = 2C(t)
then start using RSF policy. We denote this
modified RSF (MRSF) policy.
Corollary 1. Let
a=
R(0)
C(0)
−1
for
0<a ≤1
. MRSF policy has:
c≤ k−ak+a(
k+1
2
+
k−1
2n
)+O(d) =k−
a(k−1)(n−1)
2n
+O(d) <k
With MRSF policy, we shown that there exists a policy that
performs better than greedy for any
R(0)
,
C(0)
in worst cases
by randomization and distributing job progress.
4.2 Average Case with Stochastic Model
Since spot availability is a complex stochastic process, we
propose a simpler model that is analytically tractable for the de-
velopment of practical policies. With that model, we will show
that n-sliced greedy is better than greedy in the average case.
In order to model the spot process, we consider a smoothed
version where we assume that a fractional spot is always
available, with a ratio
r <1
, i.e., a job running on the fractional
spot makes
r
amount of progress per unit of time. For example,
if spots have 4-hour average lifetimes and 1-hour average wait
times after preemption. Then, the fractional spot has a ratio,
r = 4/(4 + 1) = 0.8
, and a job using it makes
0.8
amount of
progress per unit of time.
Similar as §4.1, for simplicity, we assume that
d
is relatively
small and ignore terms of
O(d)
. We first consider greedy policy.
It will use the fractional spot until
R(t
′
) = C(t
′
) + O(d)
and
then switch to on-demand. At time
t
′
, the job progress on the
fractional spot would be
C(0)−C(t
′
)=rt
′
−O(d)
, i.e.,
C(t
′
)=
C(0) − rt
′
+ O(d)
, and the remaining time would be
R(t
′
) =
R(0)−t
′
. We can derive
t
′
and expected payment (total cost)
p
:
R(t
′
)=C(t
′
) =⇒ R(0)−t
′
=C(0)−rt
′
+O(d) (1)
t
′
=
R(0)−C(0)+O(d)
1−r
(2)
p= rt
′
+(R(0)−t
′
)k+O(d)= (r−k)t
′
+kR(0)+O(d) (3)
We can observe that the payment depends on the fractional
spot ratio
r
. For simplicity, we will drop
O(d)
in following
formulas. Since
r −k < 0
, payment
p
reduces when the time
USENIX Association 21st USENIX Symposium on Networked Systems Design and Implementation 189
t
′
spent on the fractional spot increases.
In Figure 6a, we calculate both actual and theoretical costs,
p
, for greedy policy on real availability traces for a 48-hour job
with various deadlines (52 to 92 hours) and small changeover
delays. It illustrates that theoretical costs with the significant
simplified stochastic modeling matches well with actual costs.
We now consider the
n
-sliced greedy policy from §4.1. For
a fixed
r
, the
n
-sliced greedy has the same expected payment
as original greedy. However, when we started considering
the expected payment across difference traces, variance for
fractional spot involves. We show that
n
-sliced greedy works
better than original greedy in average.
Consider spot fraction
R
as a random variable with mean
r
and variance
v
. We can prove that the expected time on the
fractional spot
E[t
′
]
increases with the variance
v
(see A.2.2).
With the formula in §A.2.2, we calculate the difference of
n
-sliced (with variance
ˆv
) to original greedy (with variance
v
):
∆ =
R(0)−C(0)
(1−r)
3
( ˆv−v)
where
ˆv
is the variance over slices with length
R(0)
n
and
v
is
the variance for traces with length
R(0)
. Since
R
is averaged
over time, we expect
ˆv > v
(shown in Figure 6b), i.e.,
∆ > 0
.
We can conclude that n-sliced greedy has larger E[t
′
], leading
to a lower expected cost
p
than original greedy in average case.
Also, as
v
increases with
n
,
n
-sliced policy can achieve better
performance with more slices, when d is relatively small.
5 Methodology
Building on our theoretical analysis, we now propose poli-
cies for real-world cloud settings. In this section, we will exam-
ine the performance of a Time Sliced policy derived from the
theoretical analysis, and extend it to a parameter-free Uniform
Progress policy. Additionally, we present a upper bound of cost
savings through the Omniscient policy, which has the knowl-
edge of future spot availability, and a Partial Lookahead Omni-
scient policy that only has a shorter lookahead of the future (e.g.,
6 hours). Then, we will discuss an interesting scenario when
the next spot lifetime is given, and propose an extension that
combines Uniform Progress with a Next Spot Lifetime Oracle.
Lastly, we extend the policies to multiple instances, and relaxed
job computation times and changeover delays for generality.
5.1 Time Sliced
Based on the
n
-sliced greedy policy in §4.1, we propose the
Time Sliced policy. We divide the time before deadline,
R(0)
,
into slices, and assign each slice a proportionate computation
time
C(0)/n
and deadline
R(0)/n
, denoted as
C
i
and
R
i
for
slice
i
. In each time slice, we apply greedy policy – switching
to on-demand instances when
R
i
(t) <C
i
(t)+2d
. We make two
changes compared to the
n
-sliced greedy policy: (1) jobs can
continue on spot instances whenever available after
C
i
(t) ≤0
,
and (2) if a slice makes more progress than required, we reduce
the required computation in the succeeding slice,
C
i+1
. We do
not apply randomness as in the competitive analysis for sim-
plicity based on the assumption that clouds are non-adversarial.
IDLE
SPOT
VM
Spot Availability
IDLE
SPOT
VM
Greedy ($666.32)
0 10 20 30 40 50 60
Elapsed Time (hours)
IDLE
SPOT
VM
Time Sliced (7) ($467.60)
Figure 7: Example decision traces comparing Time Sliced
and greedy policy. Time Sliced policy cuts costs by better
utilization of available spot near deadline.
0.80 0.92
Job fraction
0
20
40
Cost savings (%)
29
18
39
25
us-west-2a
n=8
n=10
33%
35%
0.80 0.92
Job fraction
14
6
23
9
us-west-2b
n=10
n=3
60%
62%
Greedy Time Sliced (Best #slices)
Figure 8: Cost savings (higher is better) vs. on-demand with
Greedy and Time Sliced policies. Job fraction is
C(0)
R(0)
, and
n
is the best number of slices chosen for the Time Sliced policy.
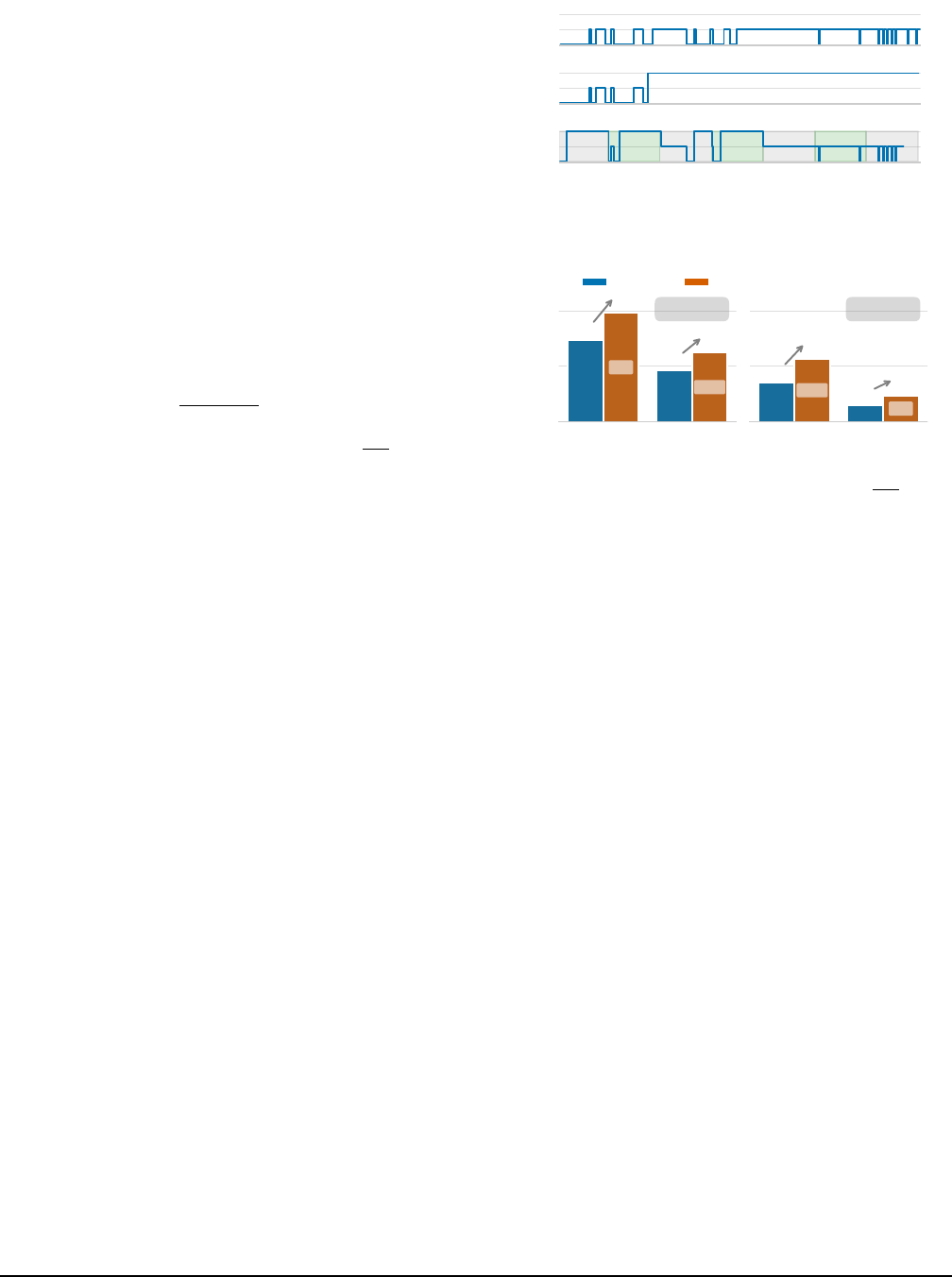
Figure 7 presents example decision traces for both greedy
and Time Sliced. The spot availability trace shows when spot is
available on cloud. The greedy policy utilizes all available spot
until
R(t) < C(t) + 2d
. At this point, the job cannot tolerate
another changeover delay and must stay on on-demand until
the end, rendering available spots close to deadline unusable.
In contrast, Time Sliced policy’s decision is divided into seven
slices (with alternating colors), with greedy applied in each
slice. Due to the progress made in earlier slices, Time Sliced
allows more slacks to switch between spot and on-demand
instances when the deadline is close. This enables better
utilization of spot instances, reducing total cost. In this specific
example, Time Sliced reduces 30% cost compared to greedy.
In Figure 8, we evaluate Time Sliced by comparing it to
greedy in terms of average cost savings across 600 random
p3.2xlarge availability traces on AWS. Picking the optimal
number of slices enables Time Sliced to achieve 33-62% addi-
tional cost savings for relatively tight deadlines. These results
suggest that ensuring uniform progress throughout a job’s life-
time leads to better utilization of spot availability in expectation.
We apply this idea in the design of Uniform Progress below.
5.2 Uniform Progress
Although Time Sliced policy with the best slice number
n
outperforms greedy, selecting the optimal
n
for different cases
is not practical. We take the uniform progress idea from Time
Sliced policy and design a parameter-free policy, denoted as
Uniform Progress.
5.2.1 Pushing the Slices to the Extreme
Time Sliced policy guarantees uniform progress by
enforcing it in discrete slices. While progress can be left
behind within a slice, it is ensured by the end of each slice.
190 21st USENIX Symposium on Networked Systems Design and Implementation USENIX Association

IDLE
SPOT
VM
Spot Availability
IDLE
SPOT
VM
Greedy ($563.51)
IDLE
SPOT
VM
Uniform Progress (plain) ($531.08)
0 10 20 30 40 50 60
Elapsed Time (hours)
IDLE
SPOT
VM
Uniform Progress ($469.88)
Figure 9: An example decision trace for Uniform Progress.
At the end of a slice
i
,
t
i
= i
R(0)
n
, i.e.,
i = t
i
n
R(0)
. The current
progress,
cp(t
i
) = C(0) − C(t
i
)
, is guaranteed to meet the
expected progress, ep(t
i
):
cp(t
i
)≥ ep(t
i
)= i
C(0)
n
=t
i
C(0)
R(0)
(4)
Note that when the slice number
n = 1
, there is only one
t
i
,
i.e.,
t
1
= R(0)
, and Time Sliced becomes greedy policy and
only enforces progress
C(0)
at deadline
R(0)
. When more
slices involve, with larger
n
,
(4)
applies to more time steps
t ∈ {
R(0)
n
,
2R(0)
n
,...,
nR(0)
n
}
. According to the stochastic model
in §4.2,
n
-sliced greedy will perform better when
n
increases,
given small changeover delays. Intuitively, this is due to a more
aggressive enforcement of progress. For instance, increasing
n
from 2 to 10 within a 50-hour deadline ensures expected
progress made every 5 hours instead of every 25 hours.
We adapt this idea into Time Sliced by pushing
n → ∞
,
making each slice infinitesimal. That enforces
(4)
at any
t ≤ R(0), i.e., fully distributing progress within the deadline:
cp(t)≥ ep(t)=t
C(0)
R(0)
,∀t ≤R(0) (5)
5.2.2 Uniform Progress Policy
We propose a parameter-free policy, called Uniform
Progress (plain), that switches among three instance states:
idle, spot, and on-demand. The policy, based on
(5)
and the
rules in §3, has the following rules:
1.
Uniform Progress: When the job is idle and
cp(t)< ep(t)
,
switch to on-demand and stay on it to catch up progress.
2.
Taking Risks: Switch to spot whenever it is available
(even when
cp(t) < ep(t)
). Stay on the spot until it is
preempted (Exploitation Rule).
To avoid missing deadline, we also apply Safety Net Rule on
top. The first rule asks the policy to maintain steady progress,
while Taking Risks rule allows the policy to utilize any available
spot instances by taking the risk of changeover delays.
In Figure 9, we show an example decision trace. Similar to
Time Sliced, Uniform Progress (plain) can achieve better cost
savings compared to the greedy policy by evenly distributing
progress within the deadline. However, during periods when
spot life/wait time are relatively short, the policy suffers from
frequent switches between spot and on-demand instances.
When the job is on on-demand, and a spot becomes available,
, spot
slice ends, spot
spot
Idle
Spot
On-
Demand
slice ends, spot
(a) Time Sliced
spot
spot
Idle
Spot
On-
Demand
, spot
, spot
(b) Uniform Progress
Figure 10: State machine diagram for Time Sliced and Uniform
Progress. spot means spot unavailable and spot means spot
available. The Safety Net Rule is left out for simplicity.
our policy will immediately switch to spot. If the spot is
preempted by the cloud shortly, the job may make little
progress. When that happens,
cp(t) < ep(t)
can still hold and
the job will be scheduled to on-demand again, wasting two
changeover delays, 2d (one for spot and one for on-demand).
To address that, we propose adding hysteresis to the policy.
Although the policy does not know or control the lifetime
of a spot instance, it can ensure that the progress made on
on-demand instances is sufficient to compensate for potential
losses in the worst-case scenario. We thus add another rule:
3.
Hysteresis: When the job is on on-demand, stay on it
until cp(t) ≥ ep(t +2d).
We call the resulting policy Uniform Progress. Figure 9 shows
that the hysteresis mitigates frequent switching by enforcing
more progress on on-demand, and improves cost savings.
Figure 10 compares the state transitions of Uniform
Progress and Time Sliced. Both policies share the uniform
progress idea, but Time Sliced is discretized, relying on Safety
Net Rule within each slice and slice boundaries to jump off
an on-demand instance. In comparison, Uniform Progress
replaces slice parameters with a global uniform progress
checker, cp(t)≥ep(t), and a hysteresis, cp(t) ≥ ep(t +2d).
We will evaluate the policies above in §6. In order to
properly assess a policy’s performance relative to the best cost
savings, we next discuss several policies, which have access to
future knowledge, and use them as cost saving upper bounds.
5.3 Omniscient
First, we propose the Omniscient policy, which assumes full
future knowledge and generates the theoretically optimal plan.
5.3.1 Omniscient Policy
The Omniscient policy minimizes cost for a given availabil-
ity trace and deadline R(0). We define some binary variables:
• a(t) whether a spot instance is available at time t.
• s(t), v(t)
indicate the policy choose to use a spot/on-
demand instance at time t.
• x(t), y(t)
represent changeover delays happen to a
spot/on-demand instance at time t.
By discretizing time, we can represent the policy as a cost
USENIX Association 21st USENIX Symposium on Networked Systems Design and Implementation 191

minimization problem:
min
s(t),v(t)
R(0)
∑
t=0
[s(t)+v(t)k] (6)
∀t, s(t)+v(t) ≤1, s(t)≤a(t) (7)
R(0)
∑
t=0
[s(t)+v(t)] ≥d
R(0)
∑
t=1
(x(t)+y(t))+C(0) (8)
∀t, x(t) ≤s(t), x(t)≤1−s(t −1), x(t)≥ s(t)−s(t−1) (9)
∀t, y(t)≤v(t), y(t) ≤1−v(t −1), y(t)≥ v(t)−v(t−1) (10)
(7)
ensures the policy to choose only one instance at a time
and only use spot when it is available;
(8)
requires the total
time on spot and on-demand instances to be larger than sum of
the time spent on changeover delays and the job runtime;
(9)
and
(10)
set variables
x(t)
and
y(t)
to 1 when a changeover
occurs for spot and on-demand instances, respectively. The
resulting formula is an integer linear programming (ILP)
problem and can be solved using ILP solvers [14, 31].
5.3.2 Partial Lookahead Omniscient Policy
Omniscient, with complete knowledge of future spot
availability, produces an unachievable bound. To better
understand the impact of partial knowledge, we propose
Partial Lookahead Omniscient, which has limited foresight
into future spot availability. By partitioning the deadline into
n
slices, it can only see complete availability within each
slice. To incorporate that knowledge, we modify Omniscient
formula to minimize the average cost of progress made in a
slice
i
while ensuring the job progress at the end to be at least
iC(0)/n. Further details can be found in §A.3.
5.4 Next Spot Lifetime Oracle
Both Omniscient and Partial Lookahead Omniscient
policies assume complete knowledge of future availability
with different lookahead windows. We propose a more
realistic scenario where cloud providers offer an oracle
o(t)
that returns the lifetime of the next spot instance a job can
acquire at the current time
t
. This assumption is reasonable
as providers can determine when to reclaim a spot instance.
Uniform Progress can be extended to leverage this oracle.
We introduce two new conditions to replace the hysteresis:
1.
If the job is idle, we only switch to spot when the average
cost per unit of progress is lower than on-demand cost
o(t)
o(t)−d
<k, i.e., o(t) >
kd
k−1
.
2.
If the job is on on-demand instance, we switch to spot only
when the average cost per unit of progress, considering
switching to spot and back to on-demand, is less than stay-
ing on the current on-demand:
o(t)+kd
o(t)−d
<k
, i.e.,
o(t) >
2kd
k−1
.
5.5 Extending to Multiple Instances
All the discussions above are based on single-instance
scenario. We now extend the policies to multiple instances. We
assume gang-scheduling is required, i.e., all instances must
be running for a job to progress. This is typical in distributed
ML training [22, 23, 36] and HPC workloads [11]. A cluster
may consist solely of spot instances, on-demand instances,
or a mix of both. We call clusters with an identical resource
type homogeneous and those with a mix heterogeneous.
Changeover delays are incurred when a cluster is reconfigured,
i.e., the number of spot/on-demand instances in it changes,
unless it has no instance after reconfiguration.
We introduce a new rule for all multi-instance policies:
Polarization Rule. For a job requiring
N > 1
instances, a
policy should either use no instance or
N
instances at any time.
Since gang-scheduling is required, a cluster with fewer than
N
instances incurs unnecessary costs without job progress.
Thus, once any instance is preempted, a policy should
immediately reconfigure the cluster to either 0 or N instances.
We now extend previous policies to multiple instances.
Extending Greedy and Uniform Progress. First, observing
that spot availability tends to change simultaneously for
multiple instances (§2.4), we propose each policy should
produce homogeneous clusters. We will show that this
assumption does not harm performance on reasonably large
clusters (§6.6). Combining this with Polarization Rule, the
action space for a policy is simplified to either:
N
spot,
N
on-demand, or no instances at any time t.
The problem for multiple instances is now equivalent to the
single instance, with the one-to-one mapping of states (§3.2):
•
Cluster state:
N
spot,
N
on-demand, or no instances map
to spot, on-demand or idle states for single-instance jobs.
•
Spot state: If available spot instances
a(t) <N
, it is equiv-
alent to a spot being unavailable in the single-instance
scenario, and a(t)=N maps to a spot being available.
Thus, for multi-instance jobs, we directly execute greedy
and Uniform Progress using the mappings above.
Extending Omniscient. For Omniscient, we can also restrict
it to produce homogeneous clusters and get Omniscient (Ho-
mogeneous). The detailed formulation is in §A.7.2. To obtain
a better theoretical upper bound for cost savings, however, we
further adapt Omniscient to support heterogeneous clusters,
denoted as Omniscient (Heterogeneous), by modifying the
ILP (6) to factor in a mixed cluster configuration (§A.7.3).
5.6
Relaxing Computation Time and Changeover Delay
In real-world scenarios, exact computation times and
changeover delays may be uncertain. We generalize our model
to accommodate such variability.
Computation time. To account for the inaccuracies of a user-
provided job computation time
¯
C(0)
, we denote the difference
to the actual job computation time as
δ =C(0)−
¯
C(0)
. Given
that no policy can predict
C(0)
precisely beforehand, we
adjust the deadline guarantee of the policies to be best effort,
ensuring a finish time within the original deadline plus the
difference,
R(0)+δ
. This is guaranteed by having all policies
stay on the current instance and switch to on-demand,
5
after
the job does not finish but has already made
¯
C(0)
progress,
i.e.,
¯
C(t)≤ 0
. When a user overestimates a job’s computation
time
¯
C(0) >C(0)
, it should finish before the original deadline.
5
If the job was on a spot instance, it should switch to on-demand after the
spot instance is preempted (Exploitation Rule).
192 21st USENIX Symposium on Networked Systems Design and Implementation USENIX Association

Otherwise, if the job computation time is underestimated
¯
C(0) <C(0)
, the job should finish within the original deadline
plus the difference. Note that there is no additional
d
, as Safety
Net Rule guarantees that when
¯
C(t)→ 0
, the job should either
be on on-demand already or
R(t) ≥
¯
C(t) + d
, i.e., there is a
spare d for the job to switch to on-demand.
Changeover delay. We now adjust the model to factor in sys-
tem stragglers and variations in changeover delay. We assume
that no policies can foresee the exact changeover delay until its
occurrence, though the average changeover delay is given. If
the maximum possible changeover delay,
ˆ
d
, is also given (e.g.,
the most significant possible progress loss is triggered), we can
prove that policies should be able to ensure a deadline of
R(0)+
2(
ˆ
d−d)
. The proof can be found in §A.4. If a user would like to
ensure the original deadline with a given maximum changeover
delay, they can specify a new deadline R(0)−2(
ˆ
d−d).
With the new model, policies can account for the variety, by
guaranteeing a bounded relaxed deadline
R(0)+δ+2(
ˆ
d−d)
.
6 Evaluation
In this section, we conduct experiments to assess the
performance of the proposed policies using real spot instance
traces collected from the cloud.
6.1 Datasets and Setup
We collected spot availability traces on AWS (§2.1). These
traces include a 2-week availability trace started on 10/26/2022,
with four instance types: p3.2xlarge/p3.16xlarge (1/8 V100),
p2.2xlarge/p2.16xlarge (1/8 K80), and two availability zones:
us-west-2a and us-west-2b. Moreover, we collect a 2-month
long availability trace started on 02/15/2023 for p3.2xlarge
instances across nine zones from regions, us-east-1, us-east-2,
and us-west-2. For multiple instances, we collect 2-week
preemption traces for 4 p3.2xlarge in 3 AWS zones (us-east-1f,
us-east-2a, us-west-2c), and 2-week availability traces for 16
p3.2xlarge in 3 zones (us-east-2a, us-west-2b, us-west-2c). All
the availability traces were collected with a 10-minute probe
interval. As demonstrated in §2.1, availability and preemption
traces are highly correlated, indicating that the performance of
the policies on availability traces should reflect their real-world
performance. We will use preemption traces in §6.6 for mul-
tiple instances benchmark and §7.2 for real system evaluation.
We evaluate the policies on both 2-week traces, and 2-month
traces. For all experiments, we randomly sample 300 starting
points for each trace, considering each pair of instance type
and zone. We consider cases where the job fraction
C(0)
R(0)
>0.6
,
i.e., the deadline is relatively tight, as the problem becomes
less interesting when deadlines are loose and available spot
instances within deadline are sufficient to complete the job.
For loose deadlines, jobs can utilize spot instances whenever
they are available until the remaining time-to-deadline
R(t)
is relatively tight compared to the remaining computation
time
C(t)
, and then start applying policies (details in §A.8).
The computation time is set to 48 hours for consistent
comparison across different settings (experiments for different
Policy On-Demand (hours) Spot (hours) Spot Util.
On-Demand 48.0 ± 0.0 0.0 ± 0.0 0%
Greedy 30.8±17.7 17.2 ± 17.7 63%
Uniform Progress 25.1±15.3 22.9 ± 15.4 84%
Omniscient 20.7±15.5 27.4 ± 15.5 100%
Table 3: Compute time spent on on-demand and spot instances,
averaged across 8 scenarios for a job fraction of 0.8. “Spot
Util.” indicates the fraction of compute time on spot leveraged
by a policy vs. the Omniscient policy.
0
20
40
60
Cost savings (%)
1xK80 (0.95) 1xV100 (0.68) 1xV100 (0.60) 8xK80 (0.59)
0.6 0.8
Job Fraction
0
20
40
60
Cost savings (%)
8xK80 (0.55)
0.6 0.8
Job Fraction
8xV100 (0.34)
0.6 0.8
Job Fraction
8xV100 (0.33)
0.6 0.8
Job Fraction
1xK80 (0.25)
Greedy Omniscient Uniform Progress (Ours)
Omniscient (8 slices) Uniform Progress (w. next spot oracle)
Figure 11: Cost savings (higher is better) against on-demand
instances on real spot availability traces. Omniscient (8 slices)
is Partial Lookahead Omniscient. Larger job fraction means
tighter deadline. Each sub-plot is on a (instance type, zone)
trace. Values in ‘(x)’ are average spot fractions (percentages of
time a spot instance is available) across all samples in the trace.
computation times can be found in §A.9). Unless noted,
changeover delays
d
are set to 0.2 hours and costs are
normalized by on-demand costs in all experiments.
Baselines. To our knowledge, existing methods in literature
(§8) do not consider switching between spot and on-demand
in a cost optimization and deadline adherence setting for batch
jobs. Thus, we compare our results against policies with future
knowledge, which serve as strong upper bounds.
6.2 Time Spent on On-demand and Spot Instances
We first show different policies’ overall compute times
on on-demand vs. spot instances, which exclude changeover
delays. Such breakdowns examine how well spot instances
are utilized. Table 3 shows the results with a fixed job fraction
C(0)
R(0)
= 0.8
on the 2-week traces, averaging across eight (in-
stance type, availability zone) pairs, each with 300 randomly
sampled traces. We observe that our Uniform Progress runs
on spot instances 21% longer than greedy policy on average,
reducing the gap to Omniscient’s spot usage by 57%.
6.3 Various Deadlines
Figure 11 evaluates the cost savings achieved by the
policies across various deadlines (represented as job fractions)
USENIX Association 21st USENIX Symposium on Networked Systems Design and Implementation 193

Spot: Low
Deadline: Loose
0
10
20
30
40
50
Cost difference to Omniscient (%)
11
10
6
4
Spot: Low
Deadline: Tight
10
10
7
2
Spot: High
Deadline: Loose
12
9
7
5
Spot: High
Deadline: Tight
19
14
10
5
Greedy
Time Sliced (Best #slices)
Uniform Progress (Ours)
Uniform Progress (w. next spot oracle)
Figure 12: Cost difference compared to Omniscient policy
(normalized by on-demand cost, lower is better), measuring
a policy’s proximity to Omniscient. Error bars range from
p25 to p75. “Spot” represents spot fraction. It is on 2-week
availability traces, aggregated on 300
×
8=2400 sampled traces.
on the 2-week availability traces. Our Uniform Progress
consistently surpasses the greedy in cost savings in all cases,
while approaching savings of Omniscient policy.
While Uniform Progress excels, there is still a gap to Omni-
scient. We compare Uniform Progress with Partial Lookahead
Omniscient policy with 8 slices, which assumes strong knowl-
edge of the future (around 6 hours of lookahead): Uniform
Progress achieves similar performance in most cases, despite
lacking future knowledge. This suggests any other policy
without future knowledge may not yield much higher savings.
We also investigate the potential improvement of Uniform
Progress policy by assuming cloud providers offering an
oracle for the lifetime of the next spot instance (§5.4). With
such knowledge, cost savings improve significantly, nearing
the theoretical optimum when deadlines are tighter.
The conclusions also hold on the 2-month traces (§A.5).
6.4 Impact of Spot Fraction and Deadline
To better understand the influence of spot fractions (the per-
centage of time a spot instance is available) and deadlines on
policy performance, we categorize them into two dimensions:
low or high spot fraction, and loose or tight deadline. Tight
deadline represents job fraction
C(0)
R(0)
> 75%
, while high spot
fractions are defined as those exceeding
50%
. Our 2-week
traces have an even distribution between high and low spot
fractions, while the 2-month traces show a dominance of high
spot fractions, which forms 72% of all cases. This aligns with
our earlier observation of the volatile nature of spot instance
availability (§2.2). Figure 12 presents the performance of the
policies compared to Omniscient policy (theoretical upper
bounds for cost savings) in the four categories. Results based
on the 2-month traces are covered in §A.5.
For tight deadlines, the number of feasible instance switches
is limited to at most
R(0)−C(0)
d
, demanding strategic planning of
each changeover. When spot availability is high and deadline
tight (the rightmost group of bars), all policies lacking future
knowledge exhibit a relatively large gap to the optimal.
0
20
40
60
Cost savings (%)
1xK80 (0.95) 1xV100 (0.68) 1xV100 (0.60) 8xK80 (0.59)
0.02 0.2 0.4
Delay (hours)
0
20
40
60
Cost savings (%)
8xK80 (0.55)
0.02 0.2 0.4
Delay (hours)
8xV100 (0.34)
0.02 0.2 0.4
Delay (hours)
8xV100 (0.33)
0.02 0.2 0.4
Delay (hours)
1xK80 (0.25)
Greedy Omniscient Uniform Progress (Ours)
Omniscient (8 slices) Uniform Progress (w. next spot oracle)
Figure 13: Impact of changeover delays (
d
). Values in ‘(x)’
are average spot fractions over all samples in the trace.
Nevertheless, Uniform Progress still reduces the gap by
∼
2
×
compared to the greedy policy. This efficiency arises from its
uniform progress guarantee and hysteresis, which optimize
spot utilization within the deadline while avoiding frequent
changeovers. The small gap between Uniform Progress with
the next spot lifetime oracle and Omniscient policy confirms
that the ability to skip short spot lifetimes and strategically
switching from on-demand to spot with the opportunity cost
in mind is crucial to achieve close to optimal performance.
As deadlines loosen and spot availability increases, all
policies perform closer to Omniscient policy, as jobs have
greater flexibility to wait for spot instances and switch between
resource types, i.e., judicious planning becomes less important.
Additionally, we show the performance of Time Sliced
policy with the best number of slices (within 50 slices).
Time Sliced policy outperforms Greedy because of uniform
progress it guarantees, but worse than Uniform Progress,
potentially due to a higher overhead between slice switches.
Regardless of the different categories, our Uniform Progress
policy reduces the gap to optimal by nearly 2
×
compared to
greedy policy for both average and tail (p75) cases.
6.5 Different Changeover Delays
In Figure 13, we evaluate the performance of policies across
various changeover delays. Our Uniform Progress performs
consistently similar to the Partial Lookahead Omniscient
policy. As changeover delays increase, cost savings compared
to on-demand instances are reduced. This is because for each
spot instance being used, a larger changeover delay means we
pay the same price for less actual progress, so that switching
to spot instances becomes less economical. Both Uniform
Progress and Partial Lookahead Omniscient approach the
greedy policy as
d
increases. However, Uniform Progress
combined with the next spot lifetime oracle consistently
remains close to the upper bound, due to its ability to skip
short spot lifetimes and judiciously calculate the opportunity
194 21st USENIX Symposium on Networked Systems Design and Implementation USENIX Association

Spot: Low
Deadline: Loose
0
10
20
30
40
50
Cost difference to Omniscient (%)
9
5
5
1
Spot: Low
Deadline: Tight
6
4
2
1
Spot: High
Deadline: Loose
8
6
5
0
Spot: High
Deadline: Tight
17
10
4
0
Greedy
Uniform Progress (Ours)
Uniform Progress (w. next spot oracle)
Omniscient (Homogenous)
Figure 14: Cost savings for jobs on 4 instances, compared to
Omniscient with heterogeneous clusters.
cost of switching from an on-demand to a spot instance.
6.6 Multiple Instances
We now evaluate the policies on multi-instance jobs.
Figure 14 shows the cost savings on 4-instance clusters for
various policies compared to the theoretical upper bound set by
our Omniscient (Heterogeneous) policy (§5.5). The difference
between Omniscient (Homogeneous) and Omniscient
(Heterogeneous) is negligible (at most 1%), which validates
the use of homogeneous clusters in our policy formulation.
Our Uniform Progress consistently outperforms the greedy
policy, especially in high-spot-availability, tight-deadline con-
ditions, which agrees with the conclusion on single-instance
jobs (§6.4). We observe a similar win for clusters with 16
instances (§A.7.4). Due to monetary budget limits, we leave
the extension to larger clusters (N >16) to future work.
6.7 Relaxed Computation Time and Changeover Delay
We show that the variations for computation time and
changeover delays introduced in §5.6, marginally influence
the cost savings. In Figure 15, we apply a uniformly distributed
variance to the computation time and changeover delays, and
compare all policies with Omniscient policy, which possesses
exact knowledge of the job and delays. The experiments
are conducted in the same settings as §6.4, with a single
instance, high spot fraction, and tight deadline. All policies
can guarantee deadlines in the new model. The performance of
Omniscient with only spot availability information degrades
when the variance of computation time increases. When
a user-provided job computation time is larger than the
actual one
¯
C(0) >C(0)
(overestimate), it cannot fully utilize
spot instances close to the deadline, while, for
¯
C(0) < C(0)
(underestimate), it has to use on-demand after exceeding the
original deadline
R(0)
. Similarly, it performs worse when the
variance of changeover delay increases, due to sub-optimal
decisions made with partial information. However, in all cases,
we observe Uniform Progress outperforms greedy with a
relatively stable gap, indicating its robustness.
7 Practical Usage
In this section, we discuss our implementation of the
prototype and evaluate it with three real-workload: machine
Original
0
10
20
30
40
50
Cost difference to Omniscient (%)
20
11
5
0
Job Var.
1 hours
18
12
6
1
Job Var.
5 hours
21
15
8
4
Delay Var.
0.02 hours
20
11
5
0
Delay Var.
0.1 hours
20
12
6
1
Greedy
Uniform Progress (Ours)
Uniform Progress (w. next spot oracle)
Omniscient (Only Spot Avail.)
Figure 15: Cost savings with relaxed job computation time
or changeover delays. All policies are compared against
Omniscient knowing exact spot availability, computation time,
and changeover delays in advance. Omniscient (Only Spot
Avail.) only has the information of spot availability.
learning training, bioinformatics (HPC), and data analytics.
7.1 Implementation
We implemented the policies on top of a real multi-cloud
system, SkyPilot [44], that supports launching instances on
the public cloud providers. Given an availability zone and
an instance type to use, our policies drive a job’s resource
provisioning and switching decisions.
In the system, a controller is in charge of monitoring spot
availability and managing the job with heartbeats. All policies
are invoked by the controller behind a simple interface as fol-
lows. Periodically, the policy observes current_instance_state
(in {idle, spot, on-demand}) and a boolean is_spot_available
through the controller, and then uses them to compute a
decision (in the same state set). If the decided state differs
from the current instance state, the decision is executed by the
system’s provisioner module (e.g., switch from on-demand to
spot). To obtain the boolean is_spot_available, the controller
invokes cloud-specific capacity reservation APIs (e.g., AWS
EC2 offers a create_capacity_reservation API) which return
whether a zone has capacity for a spot instance type.
7.2 Real Workloads
We validate our policy across AWS and GCP platforms using
real-world preemption traces with spot availabilities ranging
from 70% to 90%. Metrics like changeover delays and other
system lags are measured directly from the implementation and
included in the evaluation. We summarize the settings of the
three workloads, Machine Learning (ML) Training, Bioinfor-
matics, Data Analytics, in Table 4 and explain details in §A.6.
We consider two different deadlines (job fractions 90%
and 75%) for each workload. We first present detailed cost
breakdowns for the ML workload with loose deadlines in
Figure 16. Uniform Progress achieves 48% cost savings
compared to only using on-demand. It outperforms Greedy
(15%) and approaches the optimal (55%). Similar patterns are
observed in the other two workloads. We show the cost savings
in Table 5. For Bioinfo’s c3-highcpu-88, the spot price is 91%
USENIX Association 21st USENIX Symposium on Networked Systems Design and Implementation 195

Workload Location Instance Type Spot Price (Discount) Computation Deadlines Changeover Delay
ML Training AWS (us-west-2b) p3.2xlarge $0.92/hr (-67%) 72 hrs 84/100 hrs 4+5+9 mins ≈0.3 hrs
Bioinformatics GCP (us-east1-b) c3-highcpu-88 $0.34/hr (-91%) 22.5 hrs 24/28 hrs 2+1+8 mins ≈0.2 hrs
Data Analytics AWS (us-east-1c) r5.16xlarge $1.85/hr (-55%) 27 hrs 30/36 hrs 4+1+7 mins ≈0.2 hrs
Table 4: Detailed characteristics of real workloads. Deadlines are derived from job fractions 90% and 75%, and changeover delays
are the sum of VM provisioning, environment setup, and job recovery progress loss time.
Uniform Progress
Workload On-demand Tight DDL (0.9) Loose DDL (0.75)
ML $233.5 $138.2 (-41%) $122.0 (-48%)
Bioinfo $140.5 $51.9 (-63%) $22.8 (-84%)
Analytics $109.6 $80.0 (-27%) $74.1 (-32%)
Table 5: Cost savings for real workloads. Results of two
deadlines are shown (job fractions 0.9 and 0.75).
cheaper than on-demand. This allows Uniform Progress to
achieve 63% cost savings even when the deadline is tight and
84% savings when the deadline is loose. For the analytics
workload, the spot price discount is much smaller (55%). In
this case, Uniform Progress achieved 27% and 32% savings
for tight and loose deadlines, respectively. Note, however,
these savings still approach those achieved by the Omniscient
(32% and 46%, for tight and loose deadlines).
8 Related Work
Spot pricing and availability modeling. AWS pioneered spot
instances in 2009, using a bidding mechanism to monetize
unused cloud capacity [5]. The pricing model has evolved
to offer more stability, diminishing bidding, with other cloud
providers adopting similar strategies, such as GCP’s constant
30-day spot price [2], Oracle Cloud’s fixed 50% discount
for preemptible instances [6], and Azure’s stable regional
pricing [21]. While spot pricing is relatively stable, modeling
spot availability remains challenging due to its black box
nature. While prior work attempted to model preemption pat-
terns [20] and employed ML prediction methods [16, 42, 43],
we design our policy to be robust against potential changes
in spot eviction strategies of the cloud providers.
Applications using spot instances. The cost-effective nature
of spot instances has driven their adoption for savings. Frame-
works like Bamboo [38], Spotnik [40], and Srifty [28], was
developed for machine learning on spot instances. Narayanan
et al. [33] showed significant reductions in machine learning
training costs using spot instances across multiple clouds.
CompuCache [47] leverages spot instances for in-memory
data caching. However, preemptions can negatively impact
application performance [10, 43], and deadline-constrained
applications may struggle to effectively utilize spot instances.
Job scheduling with preemptions. Running jobs on preemp-
tive devices is investigated on intermittent systems, where
jobs can be interrupted due to sporadic harvestable energy.
Many studies [12, 15, 18] focus on scheduling multiple real-
time IoT tasks, due to the limited computation resources on
these devices. Spot instances introduce preemption to resource-
0 50 100 150 200
Cost ($)
Omniscient
Uniform Progress (Ours)
Greedy
On-Demand
103
122
199
233
48%
Spot Delay On-Demand Delay Spot On-Demand
Figure 16: Cost breakdown of each policy for ML workload.
demanding batch jobs on clouds. From the cloud providers’ per-
spective, existing work [9,17,19] investigates how to maximize
revenue, or enhance runtime guarantees. For end-users, earlier
studies explored bidding-based policies for bag of tasks with
deadlines [30, 35, 39, 45], but these approaches are less appli-
cable to current spot markets due to changes in pricing model.
Recently, Snape [43] investigates using a mix of spot and on-
demand instances for long-running services. It optimizes for
SLO which require the number of instances available to be
close to the target one at any time. It is different from deadline-
sensitive batch jobs studied in this paper, where the job can
stay idle for long periods, as long as it can meet the deadline.
9 Conclusion
Spot instances are economically appealing, but unreliable
due to the preemptions. In this paper, we resolve a critical
challenge of minimizing the cost for delay-sensitive jobs by
utilizing a mix of spot and on-demand instances. Our work fea-
tures a comprehensive analysis of spot instances and presents
a theoretical framework to assess policies in both worst and
average cases. This inspires the development of our proposed
policy, Uniform Progress, which is simple, parameter-free, and
effective without relying on assumptions of spot availability.
Our empirical study using 3-month real-world traces demon-
strates a significant improvement in cost savings compared to
the greedy policy, closing gaps with the optimal policy by ap-
proximately 2
×
on both single or multiple instances. We also
find that if cloud providers were willing to offer an oracle for the
next spot instance’s lifetime, it could further improve applica-
tions’ cost efficiency, by enabling our Uniform Progress to ap-
proach the upper bound of cost savings. We implemented a pro-
totype on top of SkyPilot, and showcased the effectiveness of
Uniform Progress on three real workloads, reducing the cost by
27%-84%. We open source the spot traces for future research.
Acknowledgements. We thank the NSDI reviewers for their
valuable feedback. This work is in part supported by gifts from
Accenture, AMD, Anyscale, Google, IBM, Intel, Microsoft,
Mohamed Bin Zayed University of Artificial Intelligence,
Samsung SDS, Uber, and VMware.
196 21st USENIX Symposium on Networked Systems Design and Implementation USENIX Association

References
[1]
Amazon EC2 Spot customers.
https://aws.amazon.
com/ec2/spot/customers/.
[2]
GCP Spot VMs Pricing.
https://cloud.google.
com/compute/docs/instances/spot#pricing.
[3]
Google Cloud Spot VM Pricing.
https:
//cloud.google.com/compute/docs/instances/
spot#pricing.
[4]
Navigating the High Cost of AI Compute.
https://a16z.com/2023/04/27/navigating-
the-high-cost-of-ai-compute/.
[5]
New Amazon EC2 Spot pricing model: Simpli-
fied purchasing without bidding and fewer interrup-
tions.
https://aws.amazon.com/blogs/compute/
new-amazon-ec2-spot-pricing/.
[6]
Oracle Computing Pricing.
https://www.oracle.
com/cloud/compute/pricing/.
[7]
Pretraining RoBERTa using your own data.
https://github.com/facebookresearch/
fairseq/blob/main/examples/roberta/README.
pretraining.md.
[8] Vantage Cloud Cost Breakdown Report. https://www.
vantage.sh/cloud-cost-report/2023-q1.
[9] F. Alzhouri, A. Agarwal, and Y. Liu. Maximizing cloud
revenue using dynamic pricing of multiple class virtual
machines. IEEE Transactions on Cloud Computing,
9(2):682–695, 2018.
[10]
P. Ambati, I. Goiri, F. Frujeri, A. Gun, K. Wang, B. Dolan,
B. Corell, S. Pasupuleti, T. Moscibroda, S. Elnikety,
M. Fontoura, and R. Bianchini. Providing SLOs for
Resource-Harvesting VMs in cloud platforms. In 14th
USENIX Symposium on Operating Systems Design and
Implementation (OSDI 20), pages 735–751. USENIX
Association, Nov. 2020.
[11]
I. Buch, M. J. Harvey, T. Giorgino, D. P. Anderson, and
G. De Fabritiis. High-throughput all-atom molecular
dynamics simulations using distributed computing.
Journal of Chemical Information and Modeling,
50(3):397–403, 2010.
[12]
M. Chetto. Optimal scheduling for real-time jobs in en-
ergy harvesting computing systems. IEEE Transactions
on Emerging Topics in Computing, 2(2):122–133, 2014.
[13]
N. Chohan, C. Castillo, M. Spreitzer, M. Steinder, A. N.
Tantawi, and C. Krintz. See spot run: using spot instances
for mapreduce workflows. HotCloud, 10:7–7, 2010.
[14]
J. Forrest, T. Ralphs, H. G. Santos, S. Vigerske, J. Forrest,
L. Hafer, B. Kristjansson, jpfasano, EdwinStraver,
M. Lubin, Jan-Willem, rlougee, jpgoncal1, S. Brito, h-i
gassmann, Cristina, M. Saltzman, tosttost, B. Pitrus,
F. MATSUSHIMA, and to st. coin-or/cbc: Release
releases/2.10.10, Apr. 2023.
[15]
H. E. Ghor, M. Chetto, and R. H. Chehade. A real-time
scheduling framework for embedded systems with
environmental energy harvesting. Computers &
Electrical Engineering, 37(4):498–510, 2011.
[16]
A. Harlap, A. Chung, A. Tumanov, G. R. Ganger, and
P. B. Gibbons. Tributary: spot-dancing for elastic
services with latency SLOs. In 2018 USENIX Annual
Technical Conference (USENIX ATC 18), pages 1–14,
Boston, MA, July 2018. USENIX Association.
[17]
S. M. Iqbal, H. Li, S. Bergsma, I. Beschastnikh, and A. J.
Hu. Cospot: A cooperative vm allocation framework for
increased revenue from spot instances. In Proceedings
of the 13th Symposium on Cloud Computing, SoCC ’22,
page 540–556, New York, NY, USA, 2022. Association
for Computing Machinery.
[18]
B. Islam and S. Nirjon. Scheduling computational and
energy harvesting tasks in deadline-aware intermittent
systems. In 2020 IEEE Real-Time and Embedded
Technology and Applications Symposium (RTAS), pages
95–109. IEEE, 2020.
[19]
N. Jain, I. Menache, J. Naor, and J. Yaniv. Near-optimal
scheduling mechanisms for deadline-sensitive jobs in
large computing clusters. ACM Transactions on Parallel
Computing (TOPC), 2(1):1–29, 2015.
[20]
J. Kadupitige, V. Jadhao, and P. Sharma. Modeling the
temporally constrained preemptions of transient cloud
vms. In Proceedings of the 29th International Sympo-
sium on High-Performance Parallel and Distributed
Computing, HPDC ’20, page 41–52, New York, NY,
USA, 2020. Association for Computing Machinery.
[21]
S. Lee, J. Hwang, and K. Lee. Spotlake: Diverse
spot instance dataset archive service. In 2022 IEEE
International Symposium on Workload Characterization
(IISWC), pages 242–255, 2022.
[22]
M. Li, D. G. Andersen, J. W. Park, A. J. Smola, A. Ahmed,
V. Josifovski, J. Long, E. J. Shekita, and B.-Y. Su. Scaling
distributed machine learning with the parameter server.
In 11th USENIX Symposium on Operating Systems
Design and Implementation (OSDI 14), pages 583–598,
Broomfield, CO, Oct. 2014. USENIX Association.
[23]
S. Li, Y. Zhao, R. Varma, O. Salpekar, P. Noordhuis,
T. Li, A. Paszke, J. Smith, B. Vaughan, P. Damania, et al.
USENIX Association 21st USENIX Symposium on Networked Systems Design and Implementation 197

Pytorch distributed: Experiences on accelerating data
parallel training. Proceedings of the VLDB Endowment,
13(12), 2019.
[24]
R. Liaw, R. Bhardwaj, L. Dunlap, Y. Zou, J. E. Gonzalez,
I. Stoica, and A. Tumanov. Hypersched: Dynamic
resource reallocation for model development on a
deadline. In Proceedings of the ACM Symposium on
Cloud Computing, pages 61–73, 2019.
[25]
R. Liaw, E. Liang, R. Nishihara, P. Moritz, J. E. Gon-
zalez, and I. Stoica. Tune: A research platform for
distributed model selection and training. arXiv preprint
arXiv:1807.05118, 2018.
[26]
H. Liu, Q. Zeng, J. Zhou, A. Bartlett, B.-A. Wang,
P. Berube, W. Tian, M. Kenworthy, J. Altshul, J. R. Nery,
H. Chen, R. G. Castanon, S. Zu, Y. E. Li, J. Lucero, J. K.
Osteen, A. Pinto-Duarte, J. Lee, J. Rink, S. Cho, N. Emer-
son, M. Nunn, C. O’Connor, Z. Yao, K. A. Smith, B. Tasic,
H. Zeng, C. Luo, J. R. Dixon, B. Ren, M. M. Behrens,
and J. R. Ecker. Single-cell dna methylome and 3d
multi-omic atlas of the adult mouse brain. bioRxiv, 2023.
[27]
Y. Liu, M. Ott, N. Goyal, J. Du, M. Joshi, D. Chen,
O. Levy, M. Lewis, L. Zettlemoyer, and V. Stoyanov.
Roberta: A robustly optimized BERT pretraining
approach. CoRR, abs/1907.11692, 2019.
[28]
L. Luo, P. West, P. Patel, A. Krishnamurthy, and L. Ceze.
Srifty: Swift and thrifty distributed neural network
training on the cloud. Proceedings of Machine Learning
and Systems, 4:833–847, 2022.
[29] A. Marathe, R. Harris, D. K. Lowenthal, B. R. de Supin-
ski, B. Rountree, and M. Schulz. Exploiting redundancy
and application scalability for cost-effective, time-
constrained execution of hpc applications on amazon
ec2. IEEE Transactions on Parallel and Distributed
Systems, 27(9):2574–2588, 2015.
[30]
I. Menache, O. Shamir, and N. Jain. On-demand, spot, or
both: Dynamic resource allocation for executing batch
jobs in the cloud. In 11th International Conference
on Autonomic Computing (ICAC 14), pages 177–187,
Philadelphia, PA, June 2014. USENIX Association.
[31]
S. Mitchell, M. O’Sullivan, and I. Dunning. PuLP: A
Linear Programming Toolkit for Python. 2011.
[32]
R. O. Nambiar and M. Poess. The Making of TPC-DS.
In Proceedings of the 32nd International Conference
on Very Large Data Bases, VLDB ’06, page 1049–1058.
VLDB Endowment, 2006.
[33]
D. Narayanan, K. Santhanam, F. Kazhamiaka, A. Phan-
ishayee, and M. Zaharia. Analysis and exploitation
of dynamic pricing in the public cloud for ml training.
In Workshop on Distributed Infrastructure, Systems,
Programming, and AI, August 2020.
[34]
M. Ott, S. Edunov, A. Baevski, A. Fan, S. Gross, N. Ng,
D. Grangier, and M. Auli. fairseq: A fast, extensible
toolkit for sequence modeling. In Proceedings of the
2019 Conference of the North American Chapter of the
Association for Computational Linguistics (Demonstra-
tions), pages 48–53, Minneapolis, Minnesota, June 2019.
Association for Computational Linguistics.
[35]
D. Poola, K. Ramamohanarao, and R. Buyya. Fault-
tolerant workflow scheduling using spot instances on
clouds. Procedia Computer Science, 29:523–533,
2014. 2014 International Conference on Computational
Science.
[36]
A. Sergeev and M. Del Balso. Horovod: fast and easy
distributed deep learning in tensorflow. arXiv preprint
arXiv:1802.05799, 2018.
[37]
J. Thorpe, P. Zhao, J. Eyolfson, Y. Qiao, Z. Jia, M. Zhang,
R. Netravali, and G. H. Xu. Bamboo: Making pre-
emptible instances resilient for affordable training of
large DNNs. In 20th USENIX Symposium on Networked
Systems Design and Implementation (NSDI 23), pages
497–513, Boston, MA, Apr. 2023. USENIX Association.
[38]
J. Thorpe, P. Zhao, J. Eyolfson, Y. Qiao, Z. Jia, M. Zhang,
R. Netravali, and G. H. Xu. Bamboo: Making pre-
emptible instances resilient for affordable training of
large DNNs. In 20th USENIX Symposium on Networked
Systems Design and Implementation (NSDI 23), pages
497–513, Boston, MA, Apr. 2023. USENIX Association.
[39]
P. Varshney and Y. Simmhan. Autobot: Resilient and
cost-effective scheduling of a bag of tasks on spot vms.
IEEE Transactions on Parallel and Distributed Systems,
30(7):1512–1527, 2019.
[40]
M. Wagenländer, L. Mai, G. Li, and P. Pietzuch. Spotnik:
Designing distributed machine learning for transient
cloud resources. In Proceedings of the 12th USENIX
Conference on Hot Topics in Cloud Computing, pages
4–4, 2020.
[41]
S. Wang and M. Casado. The Cost of Cloud, a
Trillion Dollar Paradox.
https://a16z.com/2021/
05/27/cost-of-cloud-paradox-market-cap-
cloud-lifecycle-scale-growth-repatriation-
optimization.
[42]
F. Yang, B. Pang, J. Zhang, B. Qiao, L. Wang, C. Cou-
turier, C. Bansal, S. Ram, S. Qin, Z. Ma, I. n. Goiri,
E. Cortez, S. Baladhandayutham, V. Rühle, S. Rajmohan,
Q. Lin, and D. Zhang. Spot virtual machine eviction pre-
diction in microsoft cloud. In Companion Proceedings
198 21st USENIX Symposium on Networked Systems Design and Implementation USENIX Association

of the Web Conference 2022, WWW ’22, page 152–156,
New York, NY, USA, 2022. Association for Computing
Machinery.
[43]
F. Yang, L. Wang, Z. Xu, J. Zhang, L. Li, B. Qiao,
C. Couturier, C. Bansal, S. Ram, S. Qin, Z. Ma, I. n. Goiri,
E. Cortez, T. Yang, V. Rühle, S. Rajmohan, Q. Lin, and
D. Zhang. Snape: Reliable and low-cost computing with
mixture of spot and on-demand vms. In Proceedings of
the 28th ACM International Conference on Architectural
Support for Programming Languages and Operating Sys-
tems, Volume 3, ASPLOS 2023, page 631–643, New York,
NY, USA, 2023. Association for Computing Machinery.
[44]
Z. Yang, Z. Wu, M. Luo, W.-L. Chiang, R. Bhardwaj,
W. Kwon, S. Zhuang, F. S. Luan, G. Mittal, S. Shenker,
and I. Stoica. SkyPilot: An intercloud broker for sky
computing. In 20th USENIX Symposium on Networked
Systems Design and Implementation (NSDI 23), pages
437–455, Boston, MA, Apr. 2023. USENIX Association.
[45]
M. Zafer, Y. Song, and K.-W. Lee. Optimal bids for
spot vms in a cloud for deadline constrained jobs. In
2012 IEEE Fifth International Conference on Cloud
Computing, pages 75–82, 2012.
[46]
M. Zaharia, R. S. Xin, P. Wendell, T. Das, M. Armbrust,
A. Dave, X. Meng, J. Rosen, S. Venkataraman, M. J.
Franklin, A. Ghodsi, J. Gonzalez, S. Shenker, and
I. Stoica. Apache spark: A unified engine for big data
processing. Commun. ACM, 59(11):56–65, oct 2016.
[47]
Q. Zhang, P. Bernstein, D. S. Berger, B. Chandramouli,
B. T. Loo, and V. Liu. Compucache: Remote computable
caching using spot vms. In Conference on Innovative
Data Systems Research (CIDR 2022), January 2022.
A Appendix
A.1 Spot Availability and Preemption Traces
In Section 2.2, we highlighted the variability in spot
availability across four out of nine AWS availability zones.
For a comprehensive view, Figure 17 presents data for all nine
zones. It demonstrates the fluctuations in spot availability both
across zones and over time.
A.2 Proofs for Theoretical Analysis
In this section, we show the detailed proofs for the theorems
and statements in our theoretical analysis (§4).
A.2.1 Worst Case with Competitive Analysis
We first prove Theorem 1 (see §4.1), which states that a
deterministic policy cannot perform better than the greedy
policy in competitive analysis.
Theorem 1. For any deterministic policy P, c ≥k−O(d).
Proof.
Since the policy
P
is deterministic, the adversary can
choose spot availability as follows. It makes the spot available
only when
P
starts using on-demand or
R(t) =C(t)+d
. If
P
switches to the spot, the adversary waits for
d
units of time,
then preempts the spot, so
P
makes no progress on any spot
instances, i.e., must use at least C(0) units of on-demand.
With that adversary, we examine
P
have to use all on-demand
while omniscient policy can finish the job with all spots. Con-
sider the first time
t
′
, where
R(t
′
) = C(t
′
) + d
. Over
t
′
≤ t ≤
R(0)
,
P
cannot switch to spot, but the omniscient policy could
as it knows the spot will remain available, i.e.,
P
makes
C(t
′
)
progress on on-demand, while omniscient is on spot. Next,
P
must have accumulated the
C(0)−C(t
′
)
before
t
′
. Due to the
adversary, any work accumulated before
t
′
should be on on-
demand when a spot is available. Thus, the omniscient policy
can make
C(0)−C(t
′
)
of progress on those spots before
t
′
.
We now show the proof for Theorem 2, i.e., the competitive
ratio for randomized shifted greedy (RSF) policy is bounded
and lower than greedy.
Theorem 2. If R(0)≥2C(0), then for RSF policy has c<k.
Proof.
By ignoring the terms of
O(d)
, at any time
t
before the
last split, at least one of the policies is looking to use a spot
(as shown in Figure 5), so any available spot is used for at least
half of the time. Thus, except for the last
C(0)/n
progress, at
least half of the remaining progress is done on spot instances:
c≤ (
1
n
+
1−1/n
2
)k+
1−1/n
2
+O(d) =
k+1
2
+
k−1
2n
+O(d) <k
A.2.2 Average Case with Stochastic Model
In §4.2, we inferred that the expected payment (total cost),
p
,
for greedy policy in the stochastic model decreases (lower the
better) when the time
t
′
spent on the fractional spot increases.
Consider spot fraction
R
as a random variable with mean
r
and variance v. We now prove that the expected time spent on
the fraction spot
E[t
′
]
increases when
v
increases, i.e., larger
v indicates lower expected cost.
Proof. Let R = r+δ. Based on (2), we have E[t
′
]:
E[t
′
]= E[
R(0)−C(0)
1−(r+δ)
]=
R(0)−C(0)
1−r
E[1+
δ
1−r
+
δ
2
(1−r)
2
+···]
where the second equation is derived from Taylor expansion
for
δ → 0
. By construction,
E[δ] =0
and
E[δ
2
]= v >0
. When
we take the first three terms, we get an approximation:
E[t
′
]=
R(0)−C(0)
1−r
(1+
v
(1−r)
2
)
We calculate the difference of the expected time on the
fractional spot E[t
′
] for policies with variance v
1
and v
2
∆ =
R(0)−C(0)
(1−r)
3
(v
1
−v
2
)
Since
∆ >0
when
v
1
>v
2
, we can conclude that
E[t
′
]
increases
with the variance v.
A.3 Partial Lookahead Omniscient Formulation
Instead of minimizing the total cost for the progress, in
Partial Lookahead Omniscient policy, a job can make more
progress than it is assigned in each slice and reduce the
computation time required in the next slice by the additional
USENIX Association 21st USENIX Symposium on Networked Systems Design and Implementation 199

02/17 02/19 02/22 02/24 02/27 03/01
us-east-2b
us-east-2a
us-east-1f
us-east-1d
us-east-1c
us-east-1a
us-west-2c
us-west-2b
us-west-2a
0% 20% 40% 60% 80% 100%
us-east-2b
us-east-2a
us-east-1f
us-east-1d
us-east-1c
us-east-1a
us-west-2c
us-west-2b
us-west-2a
Figure 17: Spot availability is highly unpredictable and volatile. Traces are across nine AWS zones collected.
progress made. Therefore, we modify the ILP formula for the
Omniscient policy with the following formula for a slice
i
to
minimize the average cost of the progress made in that slice:
min
s(t>t
i−1
),v(t>t
i−1
)
t
i
∑
t=t
i−1
[s(t)+v(t)k]/P
i
(11)
∀t, s(t)+v(t) ≤1, s(t)≤a(t) (12)
P
i
=
t
i
∑
t=t
i−1
[s(t)+v(t)]−d
t
i
∑
t=t
i−1
+1
(x(t)+y(t)) (13)
P
i
≥
iC(0)
n
−
i−1
∑
j=1
P
j
(14)
i
∑
j=1
P
i
≤C(0) (15)
∀t, x(t) ≤s(t), x(t)≤1−s(t −1), x(t)≥ s(t)−s(t−1) (16)
∀t, y(t)≤v(t), y(t) ≤1−v(t −1), y(t)≥ v(t)−v(t−1) (17)
where the
(13)
ensures the total progress at the end of the slice
is at least
cp(t
i
) ≥ iC(0)/n
, and the
(15)
avoids making more
total progress than the job computation time.
A.4 Deadline for Changeover Delay Extension
In §5.6, we relaxed the model to account for the variations of
the changeoverdelay. We now prove that with the extension, the
deadline guaranteed by all policies should be R(0)+2(
ˆ
d−d).
Proof.
With the assumptions, all variance of changeover delay
will be directly reflected in C(t).
We consider the last moment a job is idle before it finishes
(at time t), there are three cases:
1. R(t) > C(t) + 2d
: Safety Net Rule should never be
triggered, causing the maximum time the job finishes to
be R(0)−R(t)+C(t)+
ˆ
d <R(0)+
ˆ
d−2d.
2. R(t) = C(t)+ 2d
: Safety Net Rule kicks in at
t +ε
, and
the guaranteed deadline should be
R(0)−R(t)+C(t)+
ˆ
d
,
i.e., R(0)+
ˆ
d−2d.
3. R(t) < C(t) + 2d
: It means the job was on a spot
instance and got preempted. In this case, at the time
t
′
the job jumped onto the spot instance, we have
R(t
′
) ≥ C(t
′
) + 2d
. Thus, the worst case for the
guaranteed deadline would be the job experience
two maximum changeover delays, once for jumping
onto a spot, and once for jumping onto an on-demand
0
25
50
Cost savings (%)
us-west-2b (0.90) us-west-2c (0.89) us-west-2a (0.88)
0
25
50
Cost savings (%)
us-east-2a (0.76) us-east-2b (0.68) us-east-1f (0.59)
0.6 0.8
Job Fraction
0
25
50
Cost savings (%)
us-east-1c (0.47)
0.6 0.8
Job Fraction
us-east-1d (0.45)
0.6 0.8
Job Fraction
us-east-1a (0.17)
Greedy Omniscient Uniform Progress (Ours)
Omniscient (8 slices) Uniform Progress (w. next spot oracle)
Figure 18: Cost Savings against on-demand instance for
different policies on 2 months of spot availability traces.
instance. That said, the bound for the finish time would
be R(0)−R(t
′
)+C(t
′
)+2
ˆ
d ≤R(0)+2(
ˆ
d−d).
Combining the three cases, the bound for the deadline
guaranteed should be R(0)+2(
ˆ
d−d)
A.5 Performance on 2-month Availability Traces
Various Deadlines. Figure 18 shows the cost savings of differ-
ent policies we consider on the 2-month spot availability trace.
Similar conclusions as §6.3 can be drawn from the figure that
our Uniform Progress has a much lower gap to the Omniscient
policy, with similar performance as the Partial Lookahead
Omniscient policy in various cases, including loose and tight
deadline as well as low and high spot fraction. The Next Spot
Lifetime Oracle improves our Uniform Progress even further
making the performance approach to the theoretical optimum.
Impact of Spot Fraction and Deadline. Figure 20 compares
the cost saving difference of the policies against Omniscient
policy on 2-month spot availability traces. Similar conclusions
as in §6.4 can be drawn that Uniform Progress consistently
outperforms greedy policy in all the scenarios, and applying
200 21st USENIX Symposium on Networked Systems Design and Implementation USENIX Association

0
25
50
Cost savings (%)
us-west-2b (0.90) us-west-2c (0.89) us-west-2a (0.88)
0
25
50
Cost savings (%)
us-east-2a (0.76) us-east-2b (0.68) us-east-1f (0.59)
0.2 0.4
Delay (hours)
0
25
50
Cost savings (%)
us-east-1c (0.47)
0.2 0.4
Delay (hours)
us-east-1d (0.45)
0.2 0.4
Delay (hours)
us-east-1a (0.17)
Greedy Omniscient Uniform Progress (Ours)
Omniscient (8 slices) Uniform Progress (w. next spot oracle)
Figure 19: Cost savings against on-demand instances for
different changeover delays.
Spot: Low
Deadline: Loose
0
10
20
30
40
Cost difference to Omniscient (%)
10
9
5
3
Spot: Low
Deadline: Tight
10
10
6
2
Spot: High
Deadline: Loose
5
6
4
3
Spot: High
Deadline: Tight
13
11
7
2
Greedy
Time Sliced (Best #slices)
Uniform Progress (Ours)
Uniform Progress (w. next spot oracle)
Figure 20: Cost difference compared to the Omniscient
policy (normalized by on-demand cost, lower is better). It
is on 2-month availability traces starting from 2/15/2023,
aggregated on 300×9=2700 sampled traces.
Next Spot Lifetime Oracle further increases the cost savings.
Different Changeover Delays. We also evaluate the per-
formance of the policies for different changeover delays on
the 2-month availability trace. Figure 19 illustrates that our
policy performs consistently better than the greedy policy
for different changeover delays. Similarly as §6.5, the gap of
Uniform Progress to the Omniscient policy increases while
the Next Spot Lifetime Oracle helps it regain the advantage.
A.6 Setup of Real Workloads
We benchmark all policies on real workloads in §7.2. We
describe detailed setups of the workloads in this section.
Machine Learning Training. We consider pre-training a
RoBERTa [27] model on a subset of Wikipedia, WikiText-103,
with a V100 GPU instance (p3.2xlarge) on AWS. We follow
the configuration of FairSeq’s reproduction [7,34] to train the
model for around 110 epochs (each takes about 40 minutes).
To be fault-tolerant, we checkpoint the model weights twice
per epoch to a cloud object store (AWS S3). The average
progress loss and the time to reload the model into GPU are
included in the changeover delay.
Bioinformatics. We run a bioinformatics workload of map-
ping DNA cells of sequencing data [26] on GCP. The workload
has 90 independent tasks, each with a relatively short duration
(15 minutes). Each task requires a powerful multi-core CPUs
for parallelization. We use GCP’s latest C3 generation of com-
pute instance, c3-highcpu-88. In this workload, interrupted
tasks need to be recomputed entirely after recovery. We use the
average task duration as the changeover delay (see Table 4).
Data Analytics. We run Apache Spark [46] (v3.2.0) on a
widely-used benchmark, TPC-DS [32]. We use scale factor
1000 to generate 300 GB of data on a 64-core CPU instance
(r5.16xlarge). The data is stored on a persistent disk, which
is attachable for future instances. We run all queries 10 times.
Similar to the bioinformatics workload, each query needs to
start over if interrupted. We add a weighted average of query
runtimes (7 mins) as progress loss into the changeover delay.
A.7 Extending to Multiple Instances
We extend Omniscient policy to gang-scheduling jobs with
multiple instances as mentioned in §5.5.
A.7.1 Omniscient policy
We extend Omniscient’s ILP (6) to multiple instances.
A.7.2 Omniscient with homogeneous clusters.
We first extend the formula for the homogeneous cluster
case, where all instances in a cluster with
N
instances should
be the same type (all spot, all on-demand, or none). We revise
the semantics of the original variables:
• a(t): the number of spot instances available at time t.
• s(t)
,
v(t)
indicate the policy chooses to use all spot or all
on-demand for the cluster at time t.
• x(t)
,
y(t)
represent the changeover delay that happens
to the spot/on-demand cluster at time t.
The Omniscient policy with the same instance type can be
represented as:
min
s(t),v(t)
R(0)
∑
t=0
N[s(t)+v(t)k] (18)
∀t, s(t)+v(t) ≤1, s(t)≤a(t)/N (19)
R(0)
∑
t=0
[s(t)+v(t)] ≥d
R(0)
∑
t=1
(x(t)+y(t))+C(0) (20)
∀t, x(t) ≤s(t), x(t)≤1−s(t −1), x(t)≥ s(t)−s(t−1) (21)
∀t, y(t)≤v(t), y(t) ≤1−v(t −1), y(t)≥ v(t)−v(t−1) (22)
A.7.3 Omniscient with heterogeneous clusters.
We further generalize the Omniscient policy to support
heterogeneous clusters, allowing a mix of spot and on-demand
instances in a cluster. This is the theoretical upper bound of the
cost saving we can achieve under the problem setting in §5.5.
We update the definition of variables as follows:
• s(t)
,
v(t)
: the number of spot and on-demand instances
in the cluster at time t.
USENIX Association 21st USENIX Symposium on Networked Systems Design and Implementation 201

Spot: Low
Deadline: Loose
0
10
20
30
Cost difference to Omniscient (%)
8
5
3
1
Spot: Low
Deadline: Tight
7
6
3
0
Spot: High
Deadline: Loose
11
7
5
1
Spot: High
Deadline: Tight
13
9
9
3
Greedy
Uniform Progress (Ours)
Uniform Progress (w. next spot oracle)
Omniscient (Homogenous)
Figure 21: Cost savings for gang-scheduling jobs on 16-
instance clusters, compared against theoretical upper bound
(Omniscient policy allowing heterogeneous clusters). Uniform
Progress consistently outperforms greedy policy.
• p(t): whether the cluster is UP at time t.
• z(t): whether changeover delay is triggered at time t.
• m(t), n(t), j(t), k(t): intermediate binary variables.
The following is the Omniscient policy for multi-nodes
with gang scheduling.
min
s(t),v(t)
R(0)
∑
t=0
[s(t)+v(t)k] (23)
∀t, s(t)+v(t)−N · p(t)=0, s(t) ≤a(t) (24)
R(0)
∑
t=0
[s(t)+v(t)] ≥d
R(0)
∑
t=1
z(t)+C(0) (25)
∀t, s(t)−s(t−1)≤N ·z(t) (26)
∀t, v(t)−v(t−1)≤N ·z(t) (27)
∀t, m(t)≤s(t)−s(t−1)+(N +1)· j(t) (28)
∀t, m(t)≤s(t −1)−s(t)+(N +1)·(1− j(t)) (29)
∀t, n(t)≤v(t)−v(t−1)+(N +1)·k(t) (30)
∀t, n(t)≤v(t −1)−v(t)+(N +1)·(1−k(t)) (31)
∀t, z(t)≤m(t)+n(t) (32)
(26)
and
(27)
set
z(t) = 1
, when either the number of spot
or on-demand increases in the cluster;
(28)
to
(32)
enforces
z(t) = 0
when
s(t) = s(t −1)∧v(t) = v(t −1)
, i.e., the number
of spot or on-demand used by the job does not change. That
said,
(26)
to
(32)
make sure
z(t) = 1
iff changeover delay
happens at time t.
A.7.4 Cost Savings on 16 Instances
We scale up the experiments to 16 instances using real
spot preemption traces. In Figure 21, we can observe that the
homogeneous cluster constraint only has negligible influence
on the Omniscient policy on 16-instance clusters, which is also
because the spot market is efficient enough, similar availability
of all the 16 instances in a cluster. Our Uniform Progress still
outperforms greedy policy on all 4 different scenarios with
a smaller gap to the best cost savings a system can achieve.
A.8 Loose Deadline
In this paper, we mainly discuss policy design for jobs with
relatively tight deadlines, as very loose deadlines will likely
0
20
40
60
Cost savings (%)
1xK80
spot frac: 0.95
1xV100
spot frac: 0.68
1xV100
spot frac: 0.60
8xK80
spot frac: 0.59
.25 .5 .75
Job Fraction
0
20
40
60
Cost savings (%)
8xK80
spot frac: 0.55
.25 .5 .75
Job Fraction
8xV100
spot frac: 0.34
.25 .5 .75
Job Fraction
8xV100
spot frac: 0.33
.25 .5 .75
Job Fraction
1xK80
spot frac: 0.25
Greedy
Omniscient
Uniform Progress (Ours)
Uniform Progress (w. switch point)
Figure 22: Cost savings for policies with very loose deadlines.
0
20
40
60
Cost savings (%)
1xK80 (0.95) 1xV100 (0.68) 1xV100 (0.60) 8xK80 (0.59)
3 25 50
Compute (hr)
0
20
40
60
Cost savings (%)
8xK80 (0.55)
3 25 50
Compute (hr)
8xV100 (0.34)
3 25 50
Compute (hr)
8xV100 (0.33)
3 25 50
Compute (hr)
1xK80 (0.25)
Greedy
Omniscient
Uniform Progress (Ours)
Uniform Progress (w. next spot oracle)
Figure 23: Cost savings with various job computation time.
Job fraction (computation time/deadline) is set to 85%.
lead to jobs able to finish on spot instances only. As mentioned
in §6.1, when a loose deadline is given, a job can utilize spot
instances whenever available until timestamp
t
0
, when the
remaining time to deadline
R(t
0
)
becomes tight compared
to the job progress
C(t
0
)
, and apply the policy. We conduct
experiments for loose deadlines, by setting the switch point
at
C(t
0
)
R(t
0
)
=0.7.
In Figure 22, we can see that greedy policy gets close to the
upper bound of the cost savings for very loose deadlines, as
jobs are likely to be able to finish on spot instances only. It is
worth noticing that job fraction
0.25
represents the deadline
202 21st USENIX Symposium on Networked Systems Design and Implementation USENIX Association

is
4x
longer than the job duration. By allowing jobs to utilize
as many spot instances as possible when the remaining time is
abundant, all policies perform similarly in cases where loose
deadlines are given.
A.9 Various Job Computation Time
We compare the cost savings for the policies across
different job computation times with the same job fraction
85% in Figure 23. When job computation time is very
small (comparable to the changeover delay), all policies’
cost savings drop quickly, as switching between spot and
on-demand instances is not worth the cost caused by the
changeover delay. However, when the job computation time
increases, there is more optimization opportunity for the
policies, as more changeover delay can be tolerated, leading
to a larger gap between Uniform Progress and greedy policy.
USENIX Association 21st USENIX Symposium on Networked Systems Design and Implementation 203
